Examen National du Baccalauréat 2024
Matière: Sciences de l'Ingénieur | Filière: Sciences Mathématiques (B)
Système étudié: Chariot matelasseur automatique
Constitution de l'épreuve
- Volet 1 : Présentation de l'épreuve page 1.
- Volet 2 : Présentation du système pages 2, 3.
- Volet 3 : Substrat du sujet pages 4, 5.
- Documents réponses D.Rep pages 6, 7, 8, 9, 10, 11.
- Documents ressources D.Res pages 12, 13, 14, 15, 16.
Volet 1 : Présentation de l'épreuve
➢ Vérifier que vous disposez bien de tous les documents de 1/16 à 16/16.
➢ Rédiger les réponses aux questions posées sur les documents réponses D.Rep.
NB : Tous les documents réponses D.Rep sont à rendre obligatoirement.
Vos réponses aux questions dépendront beaucoup de l'importance prêtée à la recherche des informations que peuvent contenir les différentes descriptions et les documents ressources. A chaque fois une lecture attentive est nécessaire.
Volet 2 : Présentation du système
1. Mise en situation
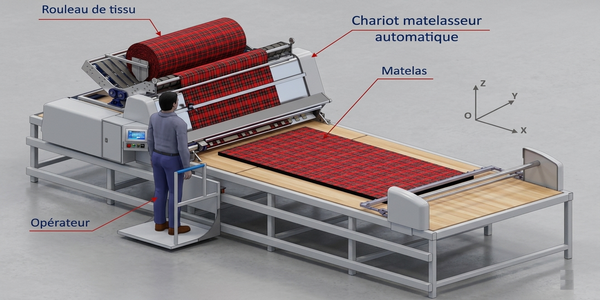
Le matelassage est une opération qui consiste à dérouler un rouleau de tissu en le déposant sur une table, sous forme de plusieurs plis (feuilles) superposés de même longueur (appelé matelas). Cette opération peut être manuelle ou automatique.
Le matelassage automatique améliore la qualité et la productivité dans l'industrie textile. Il permet aux fabricants de créer des produits finis de haute qualité tout en optimisant les processus de production.
2. Présentation
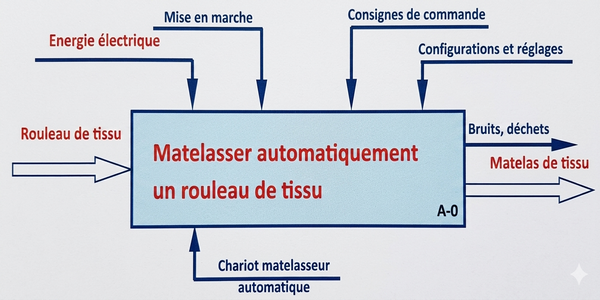
Le chariot matelasseur automatique - objet de notre étude - est un système qui permet à l'opérateur de matelasser automatiquement un rouleau de tissu sur une table, selon des paramètres de production bien précis (longueur du matelas, nombre de plis, sens de plis...). Son alimentation en énergie est assurée par le réseau électrique.
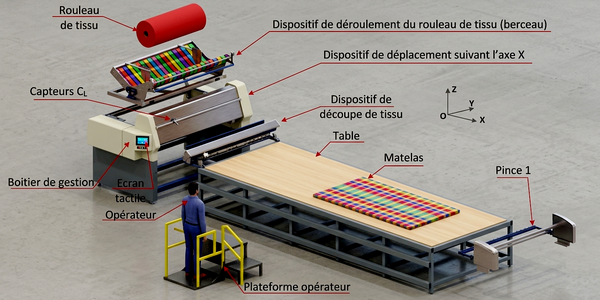
3. Constituants (Voir page suivante)
Le chariot matelasseur automatique est composé d'un :
-
☉
Dispositif de déplacement suivant l'axe X : Permet le déplacement du chariot suivant l'axe X, dans les deux sens (+X et -X) à une vitesse donnée, sur une longueur programmée et pendant un nombre de trajets bien défini ;
-
☉
Dispositif de déroulement du rouleau de tissu (berceau) : Permet le déroulement du rouleau de tissu pour le déposer sur la table à une vitesse convenable en concordance avec la vitesse de déplacement du chariot suivant l'axe X ;
-
☉
Dispositif lisière (non représenté) : Permet le déplacement du berceau suivant l'axe Y par rapport au déplacement du matelasseur afin d'assurer l'alignement des plis de tissu qui composent le matelas ;
-
☉
Dispositif de découpe de tissu : Permet le découpage de chaque pli de tissu déposé sur la table à la longueur programmée.
-
☉
Plateforme opérateur : Permet le support et le déplacement de l'opérateur avec le chariot matelasseur pendant l'opération de matelassage.
-
☉
Ensemble de capteurs pour :
- Détecter le zéro du chariot (initialisation = position 0) ;
- détecter le déplacement suivant l'axe X (codeur incrémental Cdx) ;
- détecter la vitesse de déroulement de tissu dans le berceau (codeur incrémental CdL) ;
- assurer la sécurité de l'opérateur (capteurs TOR) ;
- capteurs de fin de course ;
- capteurs CL de la position de la lisière (bord du rouleau).
-
☉
Ecran tactile sert comme moyen de communication avec l'opérateur.
-
☉
L'ensemble est géré par un automate programmable (API).
4. Fonctionnement
Après la mise sous tension du système, le chariot prend sa position initiale (position 0), l'opérateur :
-
1
Dépose le rouleau de tissu dans le berceau ;
-
2
Saisi les paramètres de matelassage : vitesse, longueur du matelas, nombre de plis, caractéristiques du rouleau de tissu.
-
3
Donne l'ordre d'exécution du programme :
-
✪
Étape 1 : avancement du chariot en +X d'une distance égale à la longueur programmée du matelas ;
-
✪
Étape 2 : maintien du bout de tissu à l'aide de la pince 1 (pincement) ;
-
✪
Étape 3 : retour du chariot en -X à la position 0 ;
-
✪
Étape 4 : découpe du pli (premier pli de tissu dans ce cas) ;
-
✪
Étape 5 : reprise des étapes 1, 2, 3 et 4 jusqu'à ce qu'on atteigne le nombre de plis désiré (programmé).
-
✪
5. FAST global du chariot matelasseur
| FP | Fonctions Techniques (FT) | Solutions Techniques |
|---|---|---|
| FP | FT1 : Acquérir les consignes et les réglages | Ecran tactile |
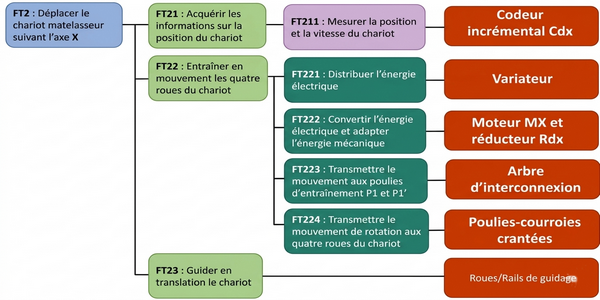
| FT2 : Déplacer le chariot matelasseur suivant l'axe X | Dispositif de déplacement du chariot suivant l'axe X | |
| FT3 : Dérouler le rouleau de tissu | Dispositif de déroulement du rouleau de tissu | |
| FT4 : Assurer l'alignement de tissu lors du déroulement | Dispositif lisière (Non étudié) | |
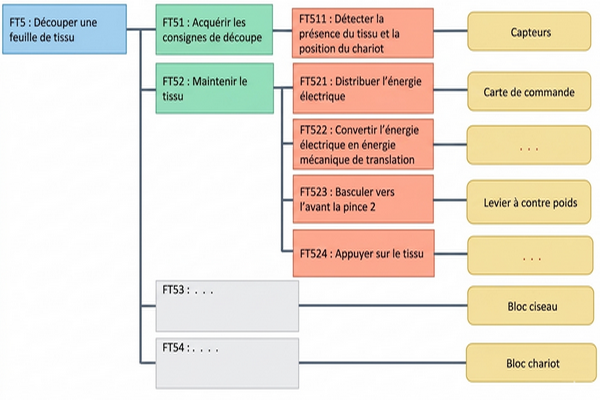
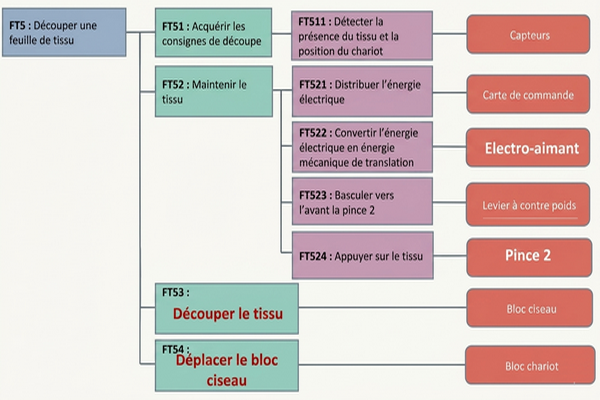
| FT5 : Découper une feuille de tissu | Dispositif de découpe de tissu | |
| FT6 : Gérer le fonctionnement | API |
6. Extrait du CdCF du chariot matelasseur
| Fonction | Critère | Niveau | Flexibilité |
|---|---|---|---|
| FP | Diamètre maximal du rouleau | 900 mm | F1 |
| Poids maximal du rouleau | 250 Kg | F1 | |
| Largeur maximale du rouleau | 2400 mm | ||
| Hauteur de matelassage | 220 mm | ±5mm | |
| Vitesse de matelassage | Jusqu'à 60 m/min | ||
| Précision de déplacement | 200 μm |
Volet 3 : Substrat du sujet
Une société leader dans la fabrication des vêtements désire augmenter sa production (qualité et rentabilité), par l'automatisation de l'opération de matelassage.
Le personnel chargé de l'utilisation du chariot matelasseur, devra connaître son fonctionnement et son environnement de travail, il devra aussi interpréter quelques solutions technologiques employées pour contrôler l'opération de matelassage. Et ce à travers les situations ci-après :
Situation d'évaluation n°1
/5,75 PtsDans le but d'appréhender le fonctionnement du chariot matelasseur et son environnement extérieur, on vous propose d'exploiter les outils de l'analyse fonctionnelle en réalisant les tâches suivantes :
Tâche n°1 : Expression du besoin et identification des interactions du chariot avec son environnement extérieur.
A partir du volet n°2, sur le D.Rep 1.
Q.01. Compléter l’Actigramme A-0.
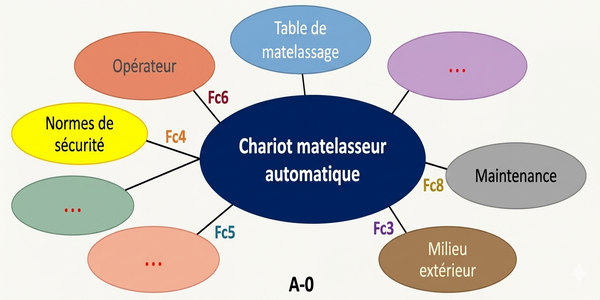
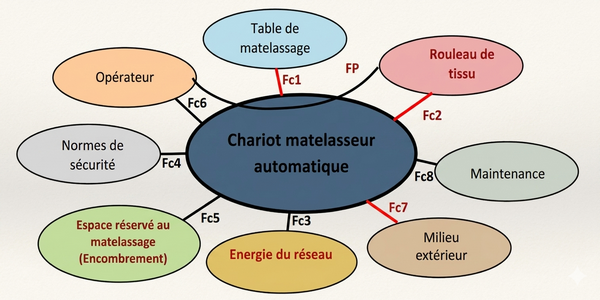
1,00 ptQ.02. Compléter le diagramme des interactions et le tableau des fonctions de services.
2,50 ptsTâche n°2 : Identification des solutions constructives employées pour réaliser quelques fonctions techniques.
A partir du volet n°2, du D.Res 1 et du D.Res 2, sur le D.Rep 2.
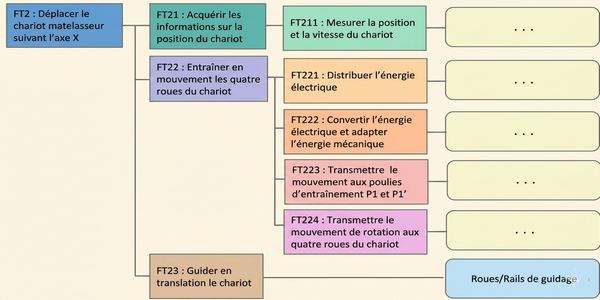
Q.03. Compléter le FAST partiel de la fonction « FT2 ».
1,25 ptQ.04. Compléter le FAST partiel de la fonction « FT5 ».
1,00 pt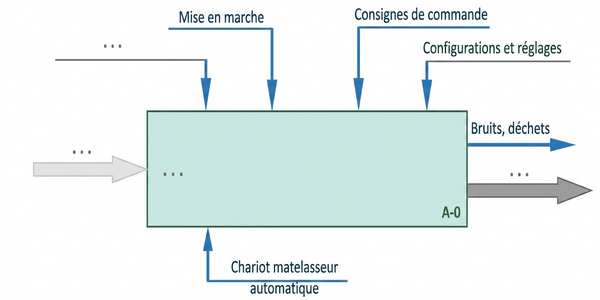
Situation d'évaluation n°2
/8,00 PtsLa charge supportée par le chariot lors de son déplacement horizontal suivant l'axe X et sa stabilité, imposent la validation de la motorisation et les réglages convenables sur certaines solutions constructives. La réalisation des tâches suivantes va permettre de découvrir et de valider ces solutions constructives :
Tâche n°1 : Validation du choix du moteur du chariot Mx.
Pour déplacer le chariot à la vitesse maximale Vchmax annoncé dans le CdCF, il faut lui appliquer une force maximale Fchmax allant jusqu'à 400 N. On se place dans ces conditions pour répondre aux questions suivantes.
A partir du volet n°2 et du D.Res 2, sur le D.Rep 3.
Q.05. Calculer la puissance maximale Pchmax (en W) nécessaire pour déplacer le chariot.
0,25 ptQ.06. Calculer le rendement global ηg de la chaîne de transmission du chariot.
0,25 ptQ.07. Calculer la puissance Pmxmax (en W) que doit développer le moteur Mx dans ce cas.
0,25 ptQ.08. Calculer la vitesse de rotation NR1 (en tr/min) de la roue 1 qui correspond à la vitesse maximale Vchmax du chariot.
0,25 ptQ.09. Calculer le rapport de transmission global rg de la chaîne de transmission du chariot.
0,25 ptQ.10. En déduire la vitesse de rotation Nmxmax (en tr/min) du moteur Mx dans ce cas.
0,25 ptQ.11. Le moteur Mx choisi par le constructeur est-il conforme ? Justifier.
0,50 ptTâche n°2 : Identification des composants du schéma électrique partiel du chariot.
A partir du D.Res 3, sur le D.Rep 4.
Q.12. Donner le nom et la fonction convenables des constituants du circuit électrique du dispositif de déplacement du chariot suivant l'axe X.
0,75 ptQ.13. Compléter le tableau par les caractéristiques convenables du réseau électrique 220V/380V-50Hz.
0,75 ptQ.14. A partir de la liste 1, choisir la solution convenable pour réaliser le bloc A.
0,25 ptQ.15. A partir de la liste 2, compléter le bloc fonctionnel du variateur « VAR VMx » par les convertisseurs statiques convenables.
0,50 ptTâche n°3 : Identification des liaisons du système tendeur de la courroie crantée.
A partir du D.Res 2 et du D.Res 4, sur le D.Rep 4.
Q.16. Compléter le schéma cinématique du système tendeur de la courroie crantée.
1,00 ptQ.17. Quel est le nombre de tour nv de la vis 1, qui permet de déplacer le galet 5 d’une distance Ld5 = 2 mm ?
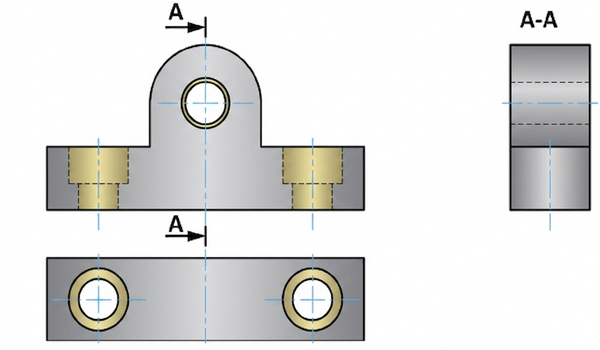
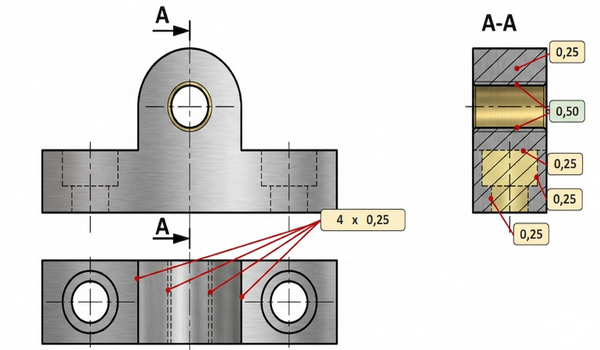
0,25 ptQ.18. Compléter le dessin de l’écrou 2 en :
- Vue de gauche en coupe A-A ;
- Vue de dessus
Tâche n°1: Validation du choix du moteur Mx
$P_{chmax} = \frac{60}{60} \cdot 400 = \mathbf{400 \text{ W}}$
$\eta_g = \mathbf{0,767 = 0,77}$
$P_{mxmax} = \mathbf{519,48 \text{ W}}$
$N_{Rx1} = \mathbf{190,99 \text{ tr/min} = 191 \text{ tr/min}}$
$r_g = \mathbf{0,217 = 0,22}$
$N_{mxmax} = \mathbf{868,18 \text{ tr/min}}$
$P_{mxmax} = 519,48 \text{ W} < 2000 \text{ W}$ et $N_{mxmax} = 868,18 \text{ tr/min} < 1420 \text{ tr/min}$
Tâche n°2: Identification des composants du schéma électrique
| Composant | Nom | Fonction |
|---|---|---|
| Qx | Disjoncteur | Protéger le circuit électrique contre les surcharges, court-circuit, ... |
| Kmx | Contacteur | Distribuer l’énergie électrique |
| Bloc A | Redresseur | Redresser la tension alternative |
• Tension composée maximale (en V): $\mathbf{537,40 \text{ V}}$
• Période (en ms): $\mathbf{20 \text{ ms}}$


Tâche n°3: Identification des liaisons du système tendeur


Situation d'évaluation n°3
/6,25 PtsCertaines caractéristiques relatives à la précision de déplacement du chariot suivant l'axe X sont liées aux solutions constructives adoptées par le constructeur et aux consignes de fonctionnement du chariot matelasseur. A travers les tâches suivantes vous êtes amenés à découvrir ses caractéristiques et à les comparer avec les consignes de fonctionnement.
Tâche n°1 : Détermination de la vitesse réelle du chariot détectée par le codeur Cdx.
A partir du D.Res 1, du D.Res 2 et du D.Res 5, sur le D.Rep 5.
Q.19. Compléter le tableau par la MOE et la MOS du codeur incrémental Cdx.
0,50 ptQ.20. Déterminer la période du signal issu de la voie A et de la voie Z (en ms), puis calculer la vitesse angulaire ωCdx (en rd/s) du disque du codeur Cdx.
1,00 ptQ.21. Déduire la résolution R du codeur Cdx.
0,50 ptQ.22. Quel est le sens de rotation du disque du codeur ?
0,50 ptQ.23. Donner en le justifiant, l'expression de la vitesse angulaire ωc1 (en rd/s) en fonction de ωCdx.
0,50 ptQ.24. Donner l'expression de la vitesse de déplacement Vch (en m/s) du chariot matelasseur en fonction de ωCdx, Zc1 et pc1.
0,50 ptQ.25. En déduire la valeur de la vitesse réelle Vch (en m/s) de déplacement du chariot.
0,25 ptQ.26. Est-elle compatible avec la valeur annoncée dans le CdCF ?
0,25 ptTâche n°2 : Comparaison du signal issu du codeur avec la consigne qui commande le moteur. Pour un cas précis de vitesse.
Le signal issu du codeur incrémental Cdx indique que la vitesse réelle du chariot est Vch = 0,5 m/s, à travers cette tâche on se propose de vérifier que le variateur de vitesse qui commande le moteur Mx délivre la fréquence convenable pour atteindre cette vitesse du chariot.
A partir du D.Res 2 et du D.Res 3, sur le D.Rep 6.
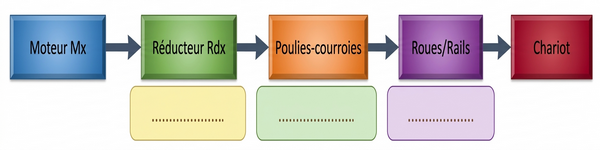
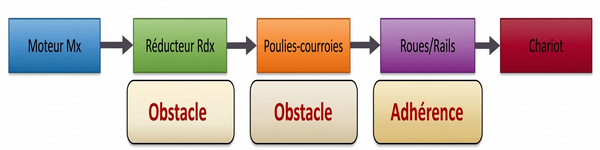
Q.27. Identifier la nature de la transmission de mouvement (Adhérence ou Obstacle) des différents composants de la chaîne de transmission suivant l'axe X du chariot matelasseur.
0,75 ptQ.28. Calculer la vitesse de rotation du moteur Nmx1 (en tr/min) lorsque Vch = 0,5 m/s. Prendre rg = 0,22.
0,25 ptQ.29. Donner l'expression de la vitesse de rotation Nmx1 (en tr/min) en fonction de g, p et fx, (fx est la fréquence (en Hz) des tensions qui alimentent le moteur).
0,25 ptQ.30. En déduire la valeur de fx (en Hz) qui correspond à la vitesse de rotation Nmx1.
0,25 ptQ.31. Les tensions d'alimentation du moteurs Mx (u1(t), u2(t), u3(t)) sont représentées sur le D. Res 3, donner la valeur de la fréquence fxm (en Hz) de ces tensions.
0,25 ptQ.32. Comparer les valeurs de fx et de fxm puis conclure.
0,50 ptTâche n°1: Détermination de la vitesse réelle du chariot détectée par le codeur Cdx
• MOS: Signal numérique
• Période de la voie Z (en ms): $T_Z = \mathbf{400 \text{ ms } (0,4 \text{ s})}$
• Vitesse angulaire $\omega_{cdx}$ (en rd/s): $\omega_{cdx} = 2 \cdot \pi \cdot f_Z = 2 \cdot \frac{\pi}{0,4} = 5 \cdot \pi \text{ rd/s} = \mathbf{15,71 \text{ rd/s}}$
• Le pignon C2 est solidaire au disque du codeur Cdx. (Liaison encastrement) Donc $\omega_{C2} = \omega_{cdx}$
• Et $\omega_{C2} = \omega_{C3} = \omega_{C1}$ puisque $Z_{C2} = Z_{C3} = 40 \text{ dents.}$
$\text{Donc } V_{ch} = \omega_{cdx} \cdot \frac{P_{C1}}{2 \cdot \pi} \cdot Z_{C1}$
$V_{ch} = \mathbf{500 \text{ mm/s} = 0,5 \text{ m/s}}$
$V_{ch} = 0,5 \text{ m/s } (= 30 \text{ m/min}) < 60 \text{ m/min}$
Tâche n°2: Comparaison du signal issu du codeur avec la consigne moteur
$N_{mx1} = \frac{60 \cdot 0,5}{\pi \cdot 0,22 \cdot 0,100} = \mathbf{434,06 \text{ tr/min}}$
(donc la période Tx = 66,35 ms)
Cela est justifié par la perte de vitesse au niveau de la transmission roues/rails (glissement mécanique).