Examen National du Baccalauréat 2024
Session de Rattrapage | Matière: Sciences de l'Ingénieur | Filière: Sciences Mathématiques (B)
📝 L'épreuve est structurée en 3 situations d'évaluation couvrant l'analyse fonctionnelle, la mécanique, l'électrotechnique, l'hydraulique et l'instrumentation.
- Volet 1 : Présentation de l'épreuve page 1.
- Volet 2 : Présentation du système pages 2, 3, 4.
- Volet 3 : Substrat du sujet pages 4, 5.
- Documents réponses D.Rep pages 6, 7, 8, 9, 10, 11, 12.
- Documents ressources D.Res pages 13, 14, 15, 16, 17, 18.
Volet 1 : Présentation de l'épreuve
➢ Vérifier que vous disposez bien de tous les documents de 1/18 à 18/18.
➢ Rédiger les réponses aux questions posées sur les documents réponses D.Rep.
NB : Tous les documents réponses D.Rep sont à rendre obligatoirement.
Vos réponses aux questions dépendront beaucoup de l'importance prêtée à la recherche des informations que peuvent contenir les différentes descriptions et les documents ressources. À chaque fois une lecture attentive est nécessaire.
Volet 2 : Présentation du système
1. Mise en situation
Dans une entreprise industrielle, les problèmes liés à la manutention de palettes en entrepôt, ont conduit les responsables du bureau d'études à proposer le dépileur comme solution permettant l'automatisation de cette tâche. Cette automatisation a pour but d'augmenter la productivité, de diminuer les coûts, d'améliorer les conditions de travail et d'organiser l'acheminement de palettes dans les zones dédiées.
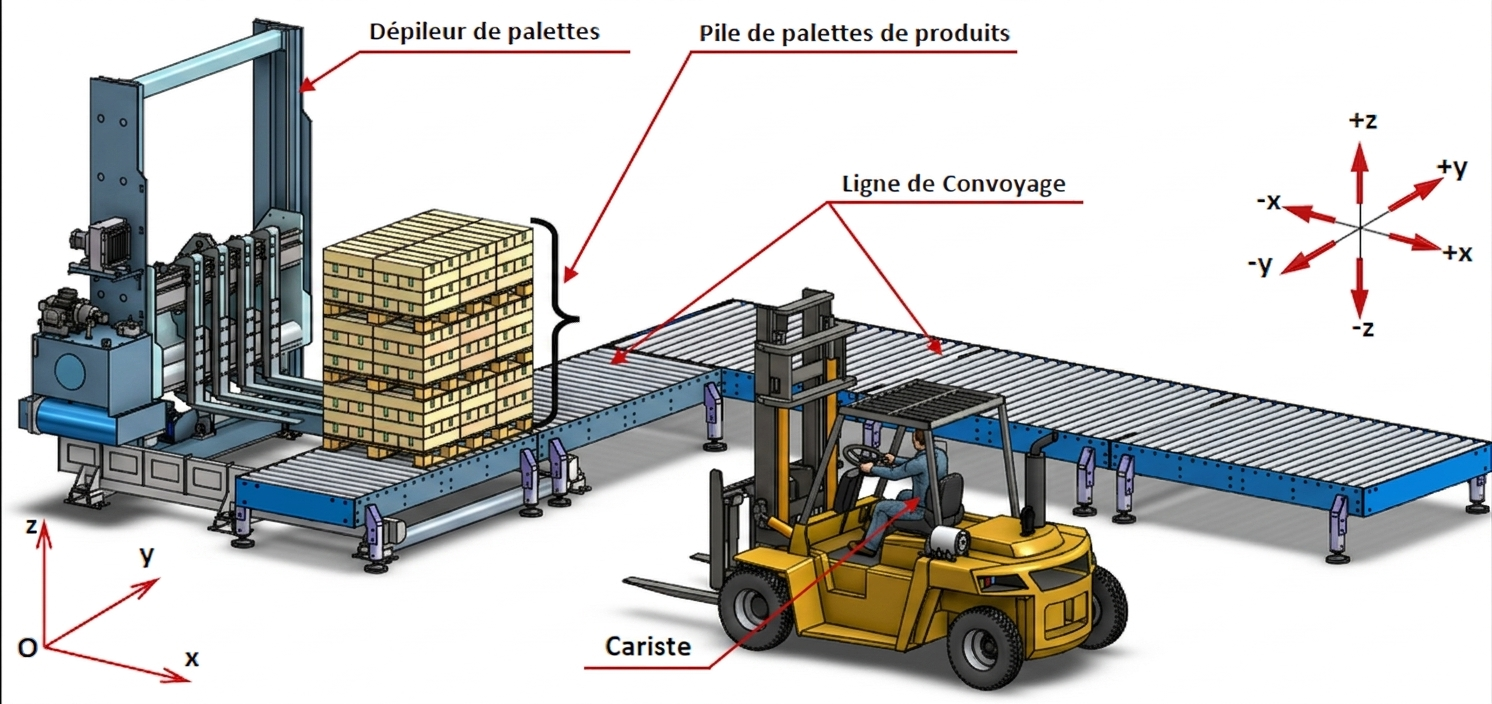
2. Présentation
Le dépileur de palettes proposé dans cette étude est un équipement industriel automatisé qui fait partie du processus de retrait des produits emballés sur une palette. Il permet de dépiler automatiquement des piles de palettes de produits afin de les introduire sur la ligne de convoyage qui va les transférer vers d'autres postes de traitement facilitant ainsi la manutention des palettes dans les entrepôts.
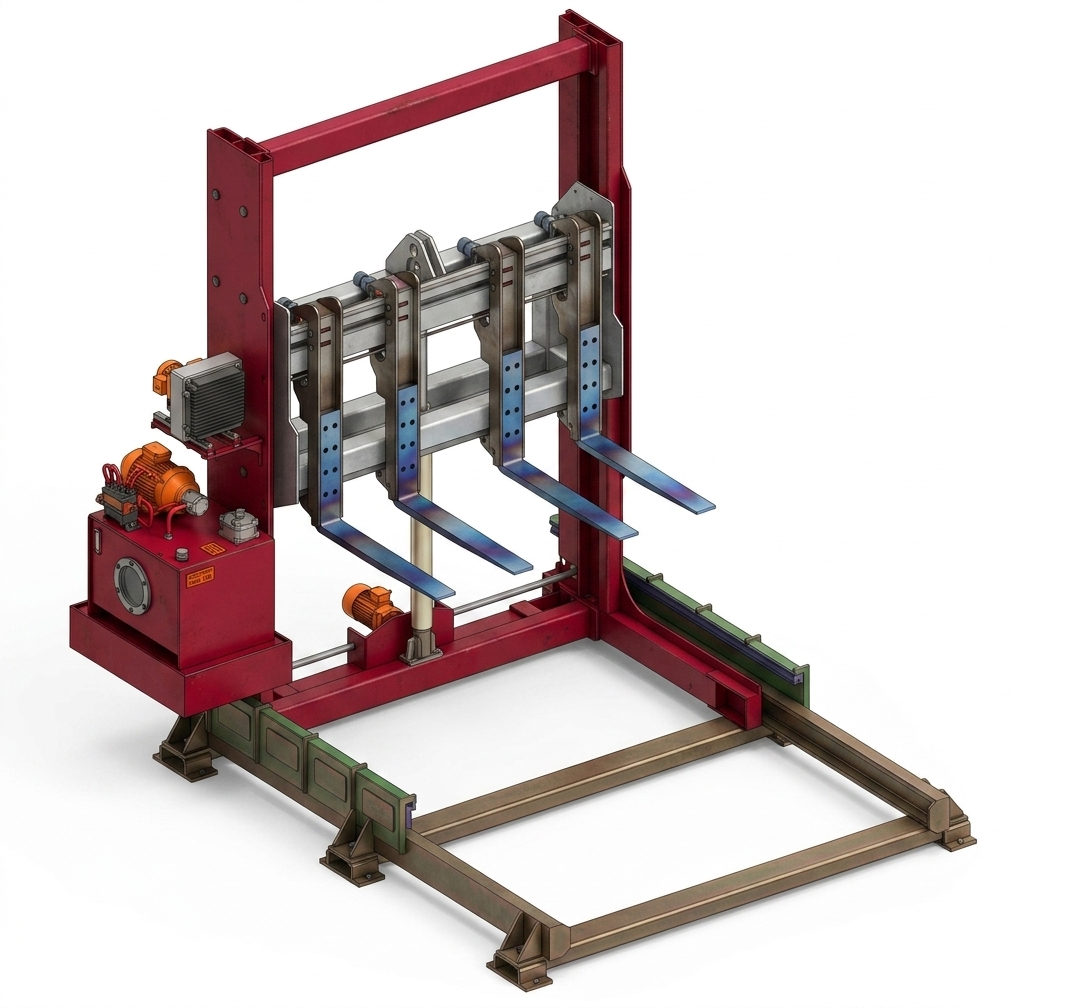
3. Constituants (Voir D. Res 1)
Les constituants du dépileur sont :
-
☉
Le module fixe (MF) : La partie fixe du dépileur : c'est un châssis mécano-soudé, fixé au sol. Il permet de supporter l'ensemble des constituants du système.
-
☉
Le module transversal (MT) : Constitué de quatre unités identiques, chaque unité comporte une fourche de levage avec sa motorisation. Ce sont ces quatre fourches qui vont supporter les palettes à soulever. Elles se déplacent suivant l'axe (Y) de façon automatique grâce à un système pignon-crémaillère entraîné par un servo-moteur, afin de s'adapter aux dimensions des palettes.
-
☉
Le module vertical (MV) : Constitué d'un chariot vertical qui se déplace suivant l'axe (Z), son mouvement est assuré par un vérin hydraulique (Vh). Ce module vertical (MV) supporte le module transversal (MT).
-
☉
Le module horizontal (MH) : Assure le déplacement horizontal suivant l'axe (X) des deux modules (MT) et (MV) afin de se placer au-dessus des palettes à soulever. Il est guidé en translation par rapport au module fixe (MF).
-
☉
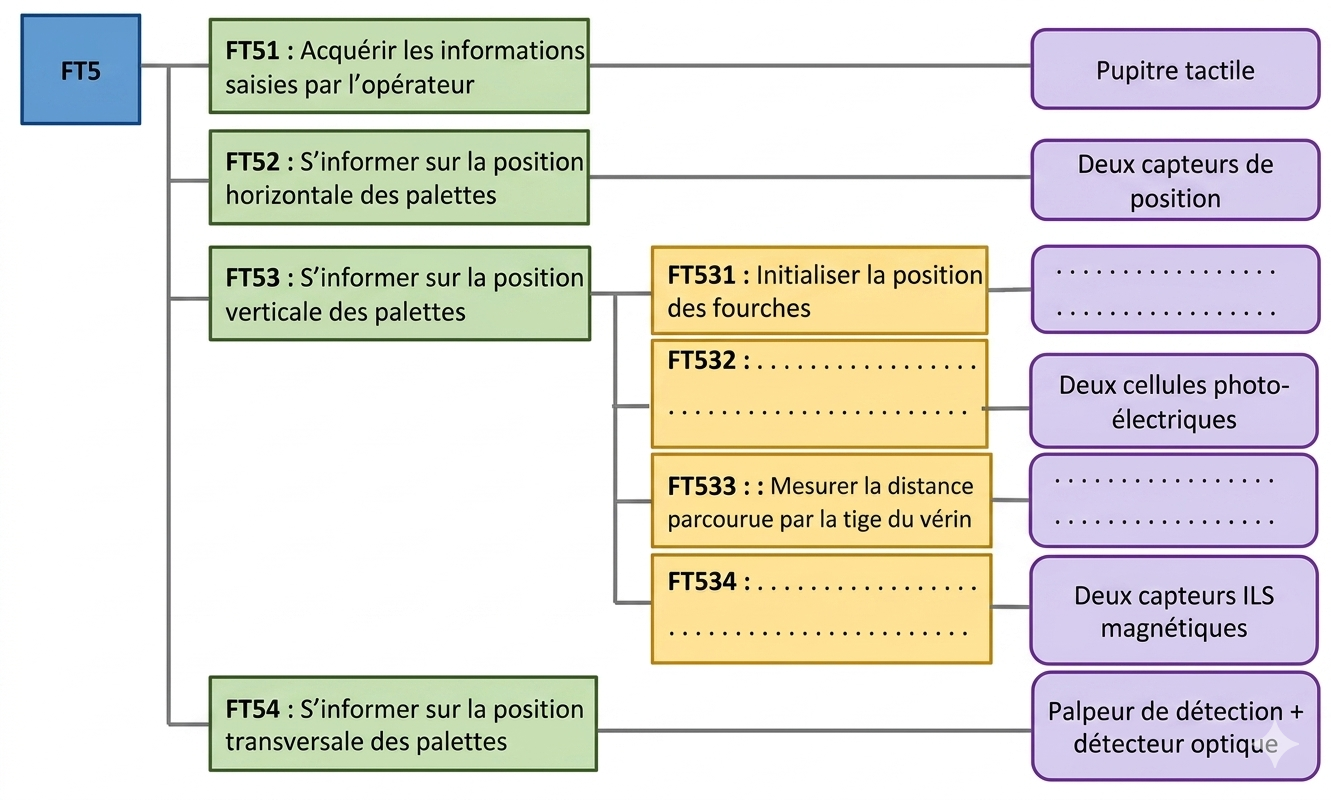
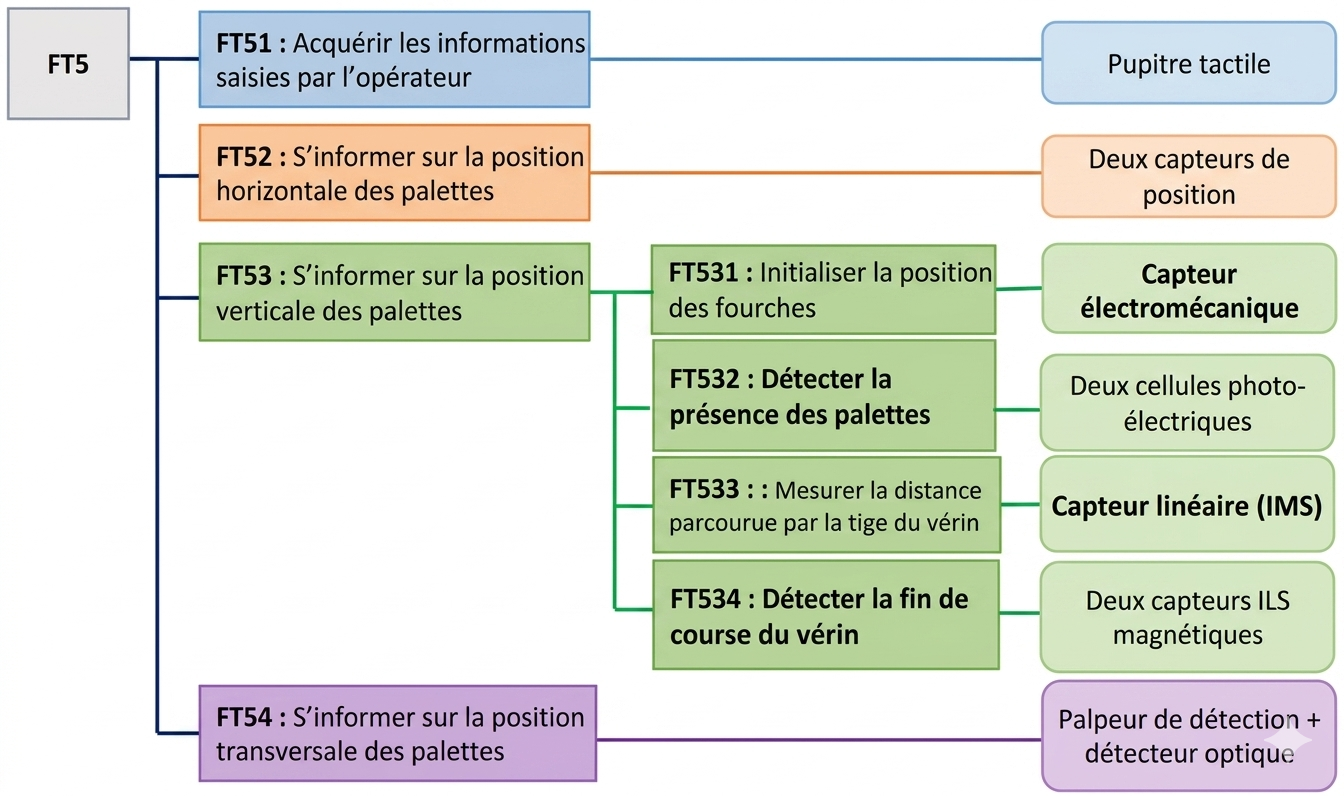
Le module de commande et d'acquisition (MCA) : Basé sur un automate programmable industriel (API), il assure la gestion globale du système, en se basant sur les informations issues de tous les capteurs ainsi que celles introduites sur le pupitre tactile servant comme interface de communication H/M. Parmi les capteurs installés on trouve :
- Un capteur électromécanique qui saisit les informations nécessaires pour le réglage de la position initiale de l'élévateur ((MV)+(MT)) ;
- Deux cellules photo-électriques qui détectent la présence des palettes à l'entrée du convoyeur et sous l'élévateur ;
- Capteur de déplacement linéaire (IMS) qui mesure la hauteur de l'élévateur ;
- Deux détecteurs (ILS) magnétiques de fin de course du vérin hydraulique (Vh).
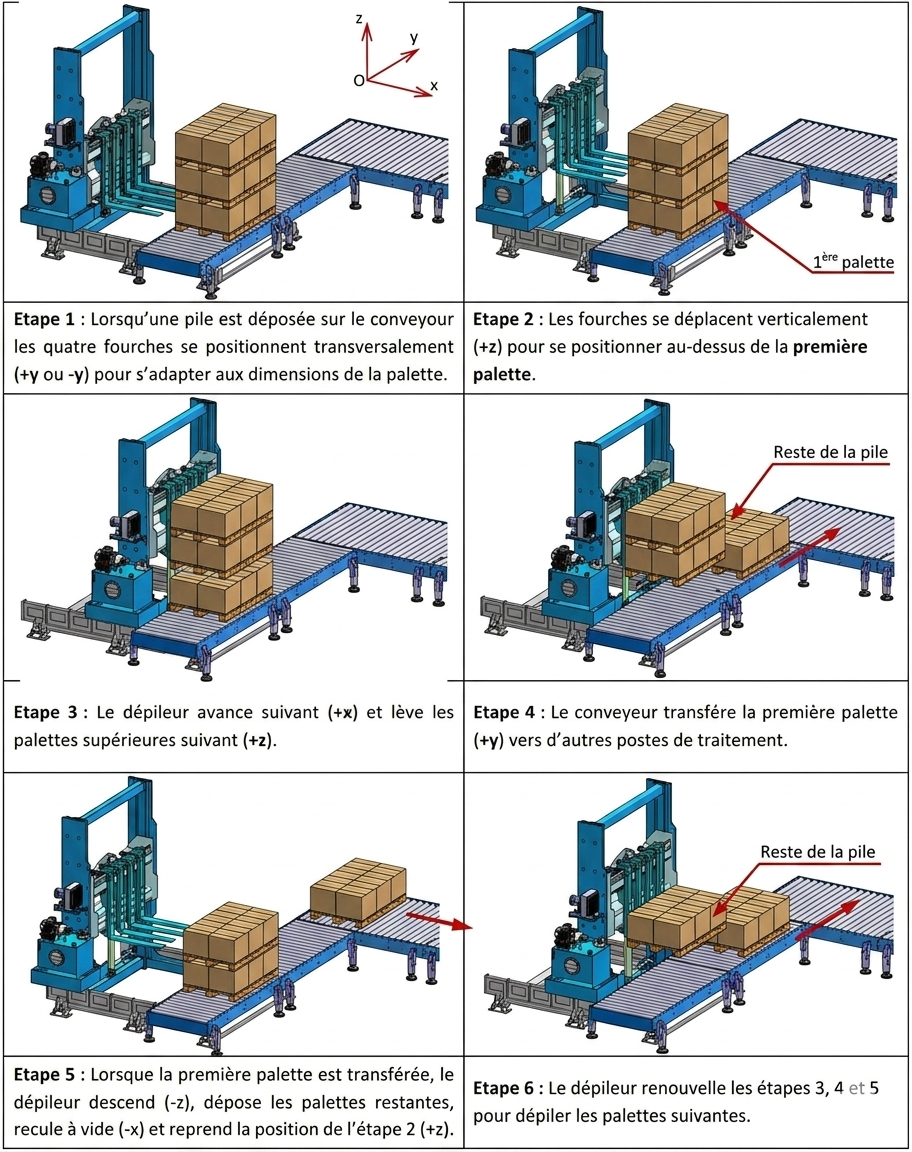
4. Fonctionnement
Au début, l’opérateur saisit les informations nécessaires (nombre de palettes, dimensions, . . .) puis une pile de palettes est déposée par un cariste sur la ligne de convoyage en face du dépileur qui fonctionne selon les étapes suivantes :
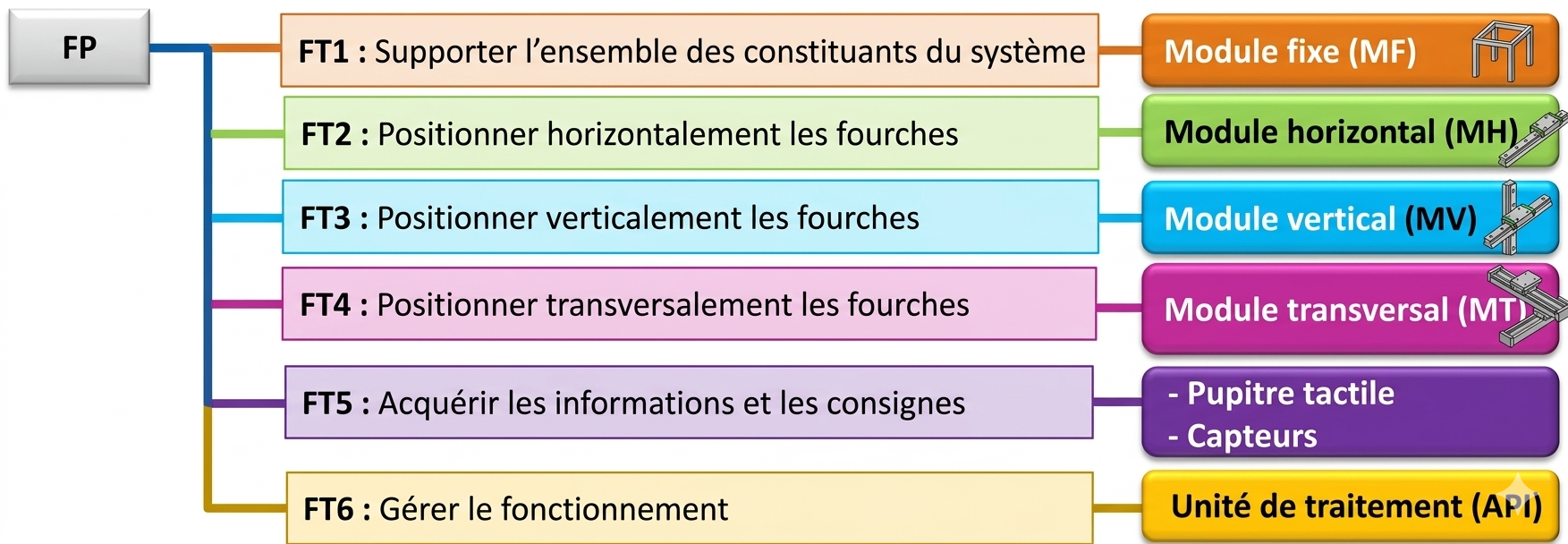
5. FAST partiel du système
Volet 3 : Substrat du sujet
Vous êtes parmi l'équipe chargée de l'installation, réglage et paramétrage d'un dépileur de palettes afin de l'intégrer dans une ligne de convoyage. Vous devez alors préparer l'environnement du matériel, étudier le fonctionnement du système et analyser certaines solutions constructives choisies par le concepteur et cela à travers les situations d'évaluation suivantes.
Avant d'entamer une étude détaillée des différents constituants du dépileur, une étude fonctionnelle de l'environnement du système est nécessaire, on vous propose alors de réaliser les tâches suivantes :
Tâche n°1 : Expression du besoin et identification de l'environnement du système.
A partir du volet n°2 et du D.Res 1, sur le D.Rep 1.
Q.01. Compléter l'actigramme A-0.
1,00 ptQ.02. Compléter le diagramme des interactions et la liste des fonctions de service.
2,00 ptsTâche n°2 : Identification des solutions constructives.
A partir du volet n°2, du D.Res 1, sur le D.Rep 2.
Q.03. Compléter la chaîne fonctionnelle relative au système.
2,00 ptsQ.04. Compléter le FAST partiel de la fonction « FT5 ».
1,00 ptLes solutions technologiques utilisées pour réaliser le déplacement horizontal des fourches du dépileur ont une grande importance pour assurer une avance précise et conforme au cahier des charges. Pour vérifier certaines solutions, et choisir le moteur convenable afin d'assurer ce déplacement ; on vous demande de réaliser les tâches suivantes :
Tâche n°1 : Analyse structurelle du module (MH).
A partir du D.Res 1, et du D.Res 2, sur le D.Rep 3.
Q.05. Quelle solution technologique a-t-on utilisé pour réaliser la liaison (L3) ?
0,25 ptQ.06. Quelle est la fonction assurée par le système {pignon (P), crémaillère (C)} ?
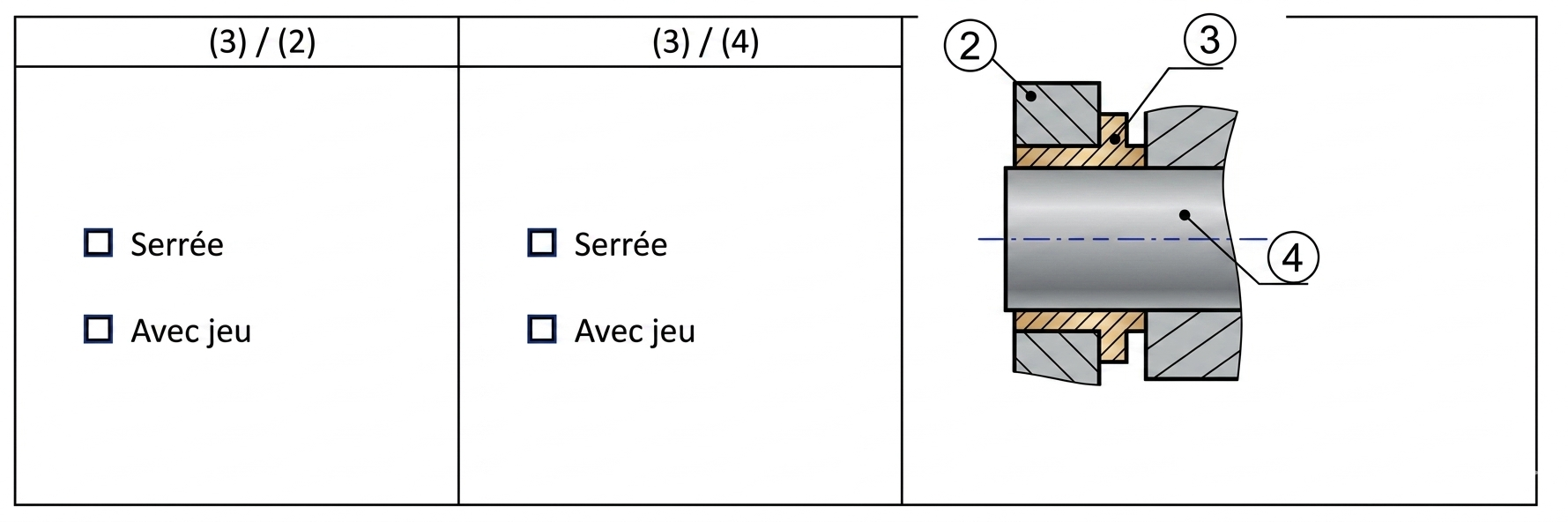
0,25 ptQ.07. Compléter le tableau relatif au système {(P), (C)} en mettant une croix (X) sur la case convenable.
0,50 ptTâche n°2 : Etude du réducteur et choix de la motorisation.
A partir du D.Res 2, et du D.Res 3 sur le D.Rep 3.
Q.08. Calculer la vitesse de rotation NP (en tr/min) du pignon (P) sachant que la vitesse de déplacement du module (MH) est VMH = 0,35 m/s.
0,25 ptQ.09. Calculer le rapport de réduction globale du réducteur rg. (Prendre quatre chiffres après la virgule)
0,25 ptQ.10. Calculer la vitesse de rotation du moteur Nm (en tr/min).
0,25 ptQ.11. Calculer la puissance Pc (en W) développée par le système {pignon (P), crémaillère (C)}.
0,25 ptQ.12. En tenant compte des rendements de la chaine de transmission, calculer la puissance fournie par le moteur Pm (en W).
0,25 ptQ.13. À partir de l'extrait du catalogue constructeur du moteur, donner le type du moteur adéquat.
0,25 ptTâche n°3 : Identification des éléments du circuit de commande.
A partir du D.Res 3, sur le D.Rep 3 et le D.Rep 4.
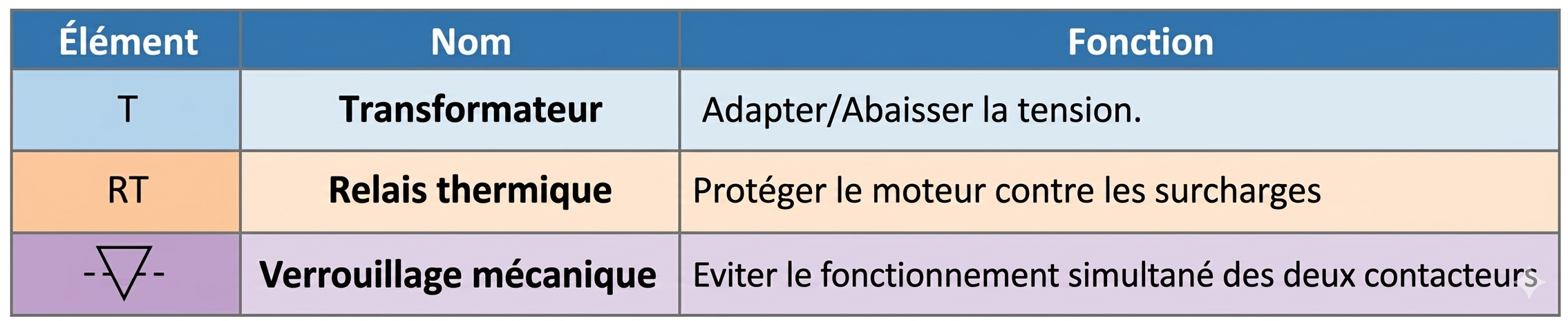
Q.14. Compléter le tableau par le nom et la fonction des éléments du circuit de puissance.
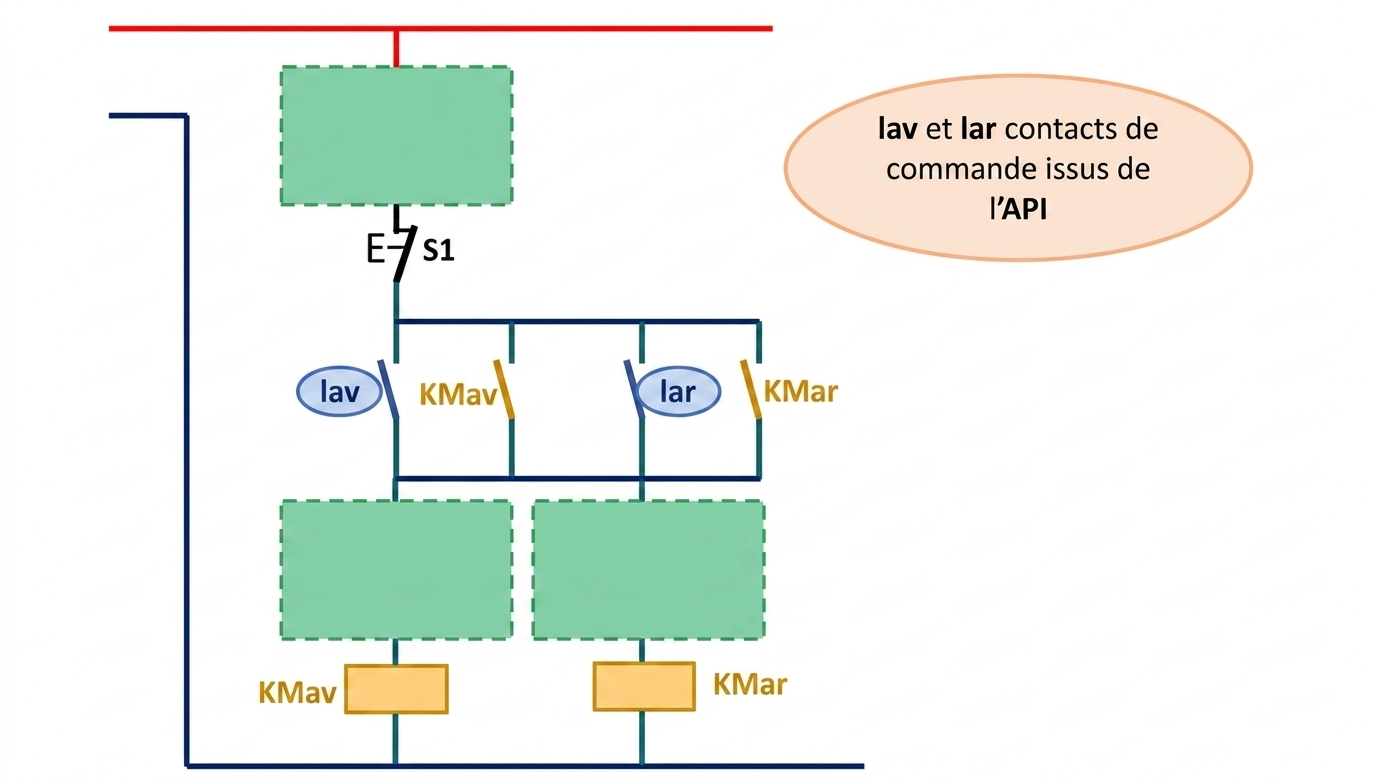
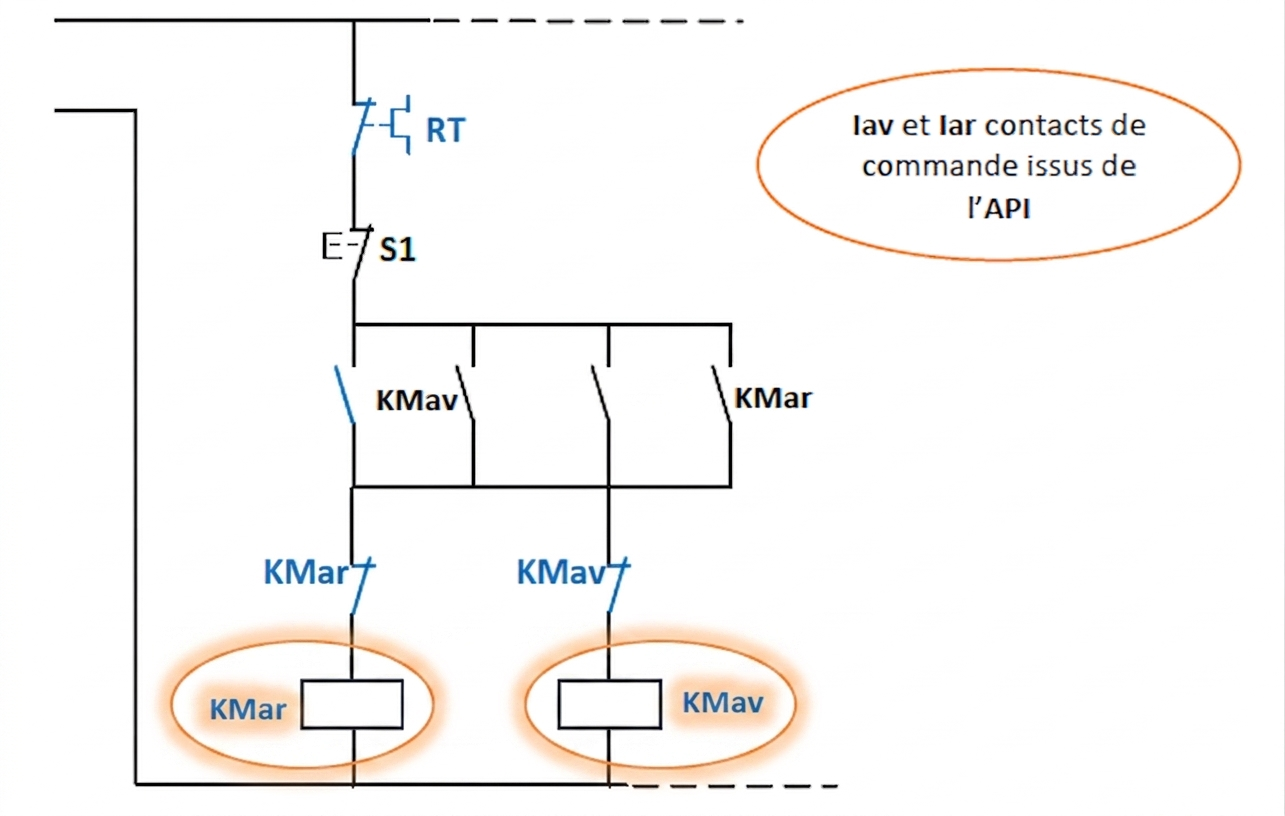
1,50 ptQ.15. Compléter le schéma du circuit de commande par les contacts adéquat des appareils de commande et de protection.
0,75 ptQ.16. Déterminer la valeur de la tension V3 (en V) à l'entrée du transformateur.
0,25 ptQ.17. En déduire la valeur de la tension composée U13 (en V).
0,25 ptLe module vertical (MV) est mis en mouvement par un vérin hydraulique. Les tâches suivantes permettent d'étudier le circuit hydraulique, le dimensionnement et le contrôle de la vitesse de déplacement du vérin Vh.
Tâche n°1 : Etude du circuit hydraulique.
A partir du D.Res 4, sur le D.Rep 4 et le D.Rep 5.
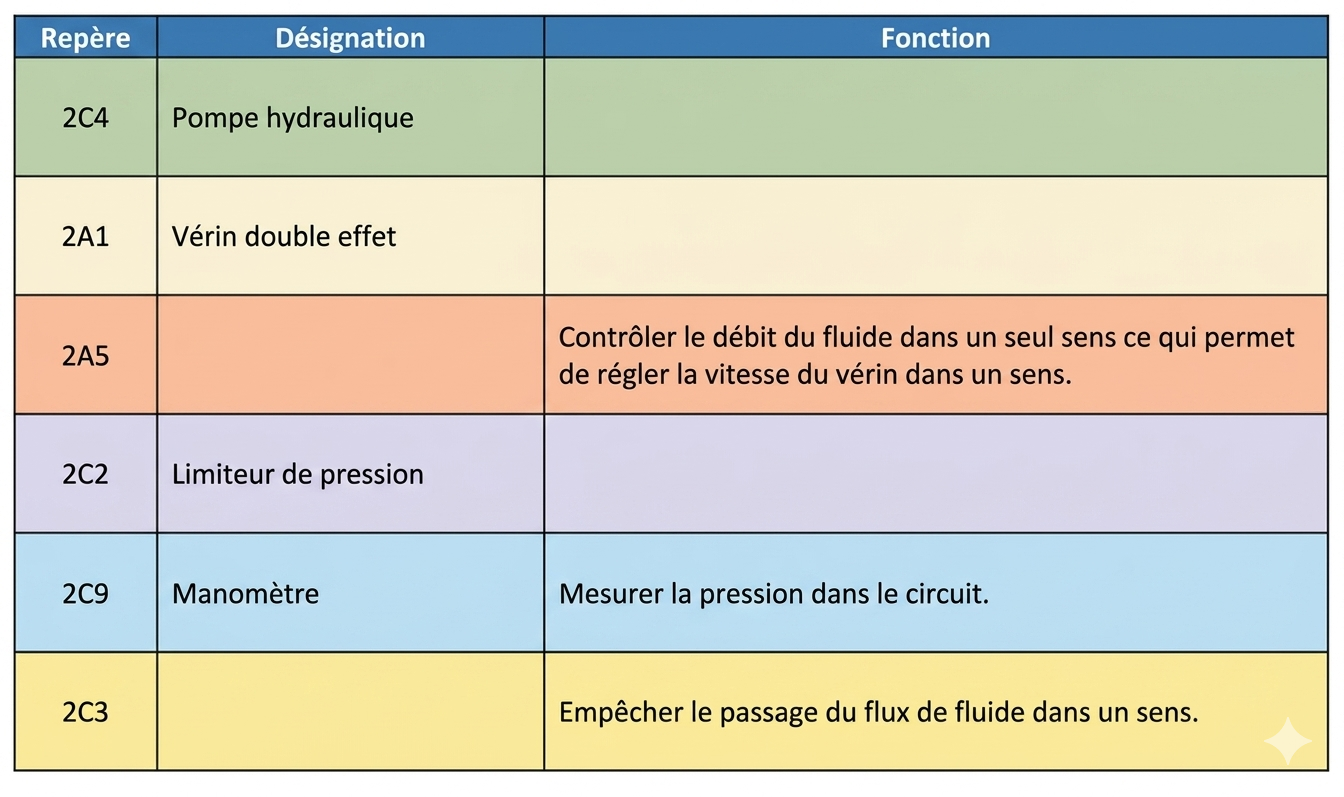
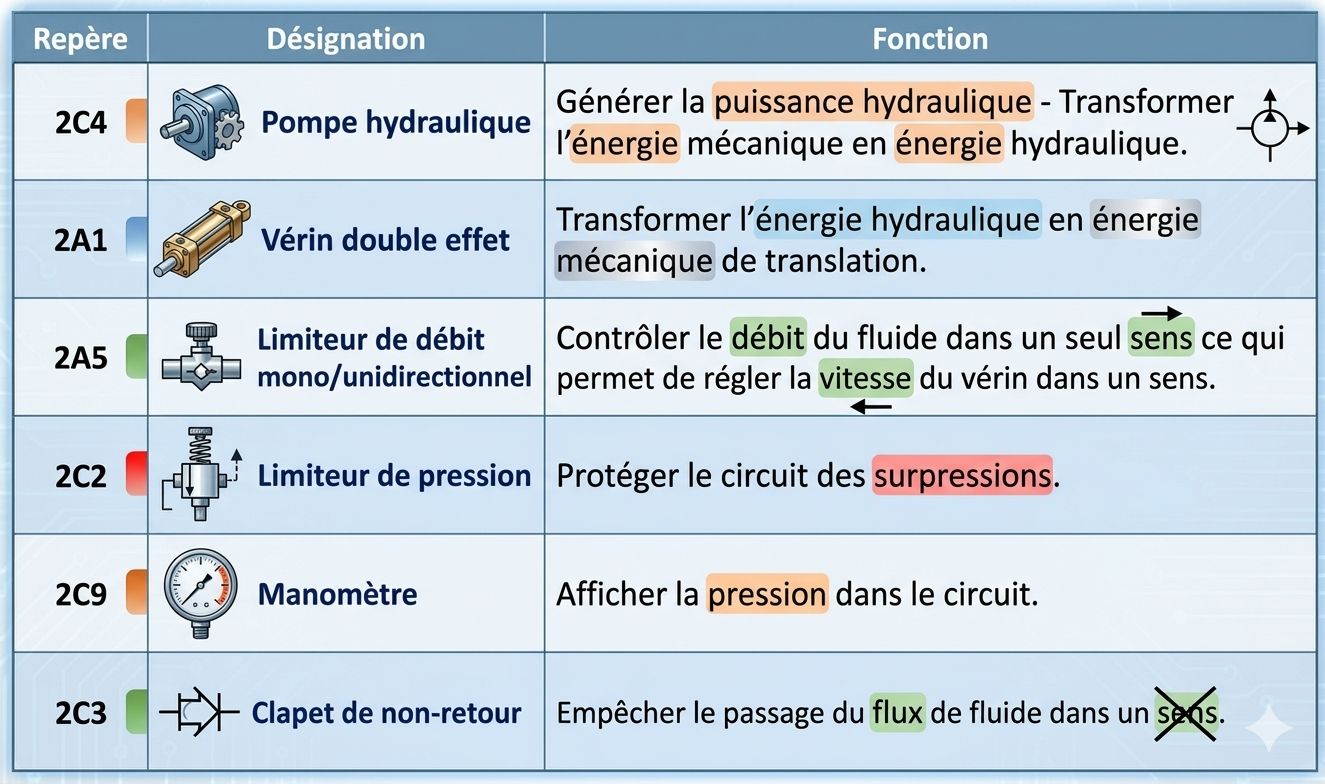
Q.18. Compléter le tableau en indiquant la désignation ou la fonction des composants du circuit hydraulique.
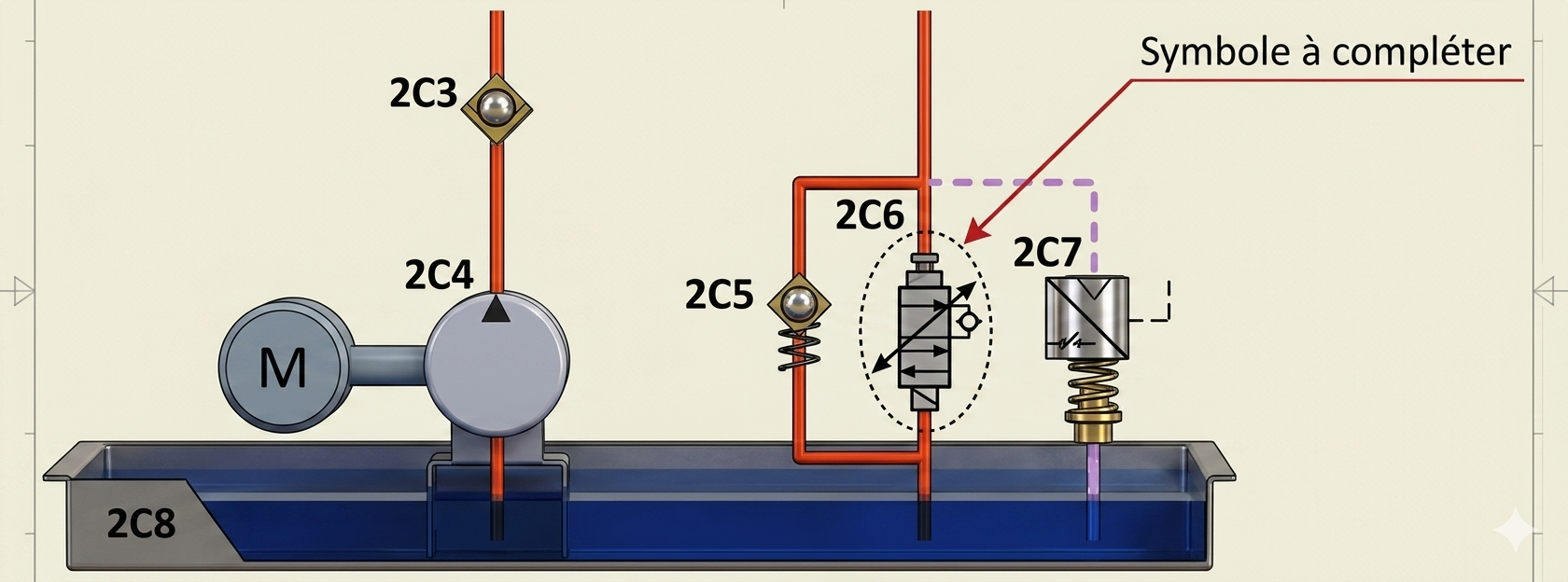
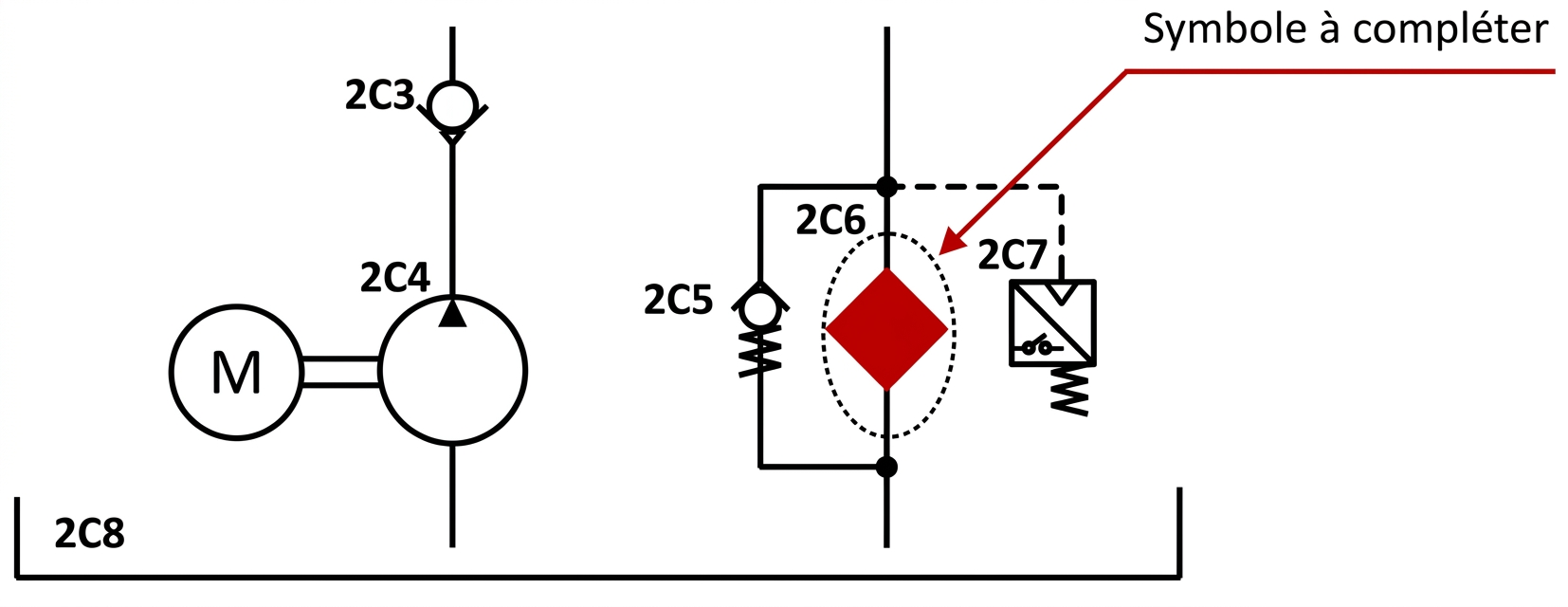
1,00 ptQ.19. Compléter le schéma hydraulique par le symbole du composant (2C6) qui empêche les impuretés de s'infiltrer dans les organes du circuit.
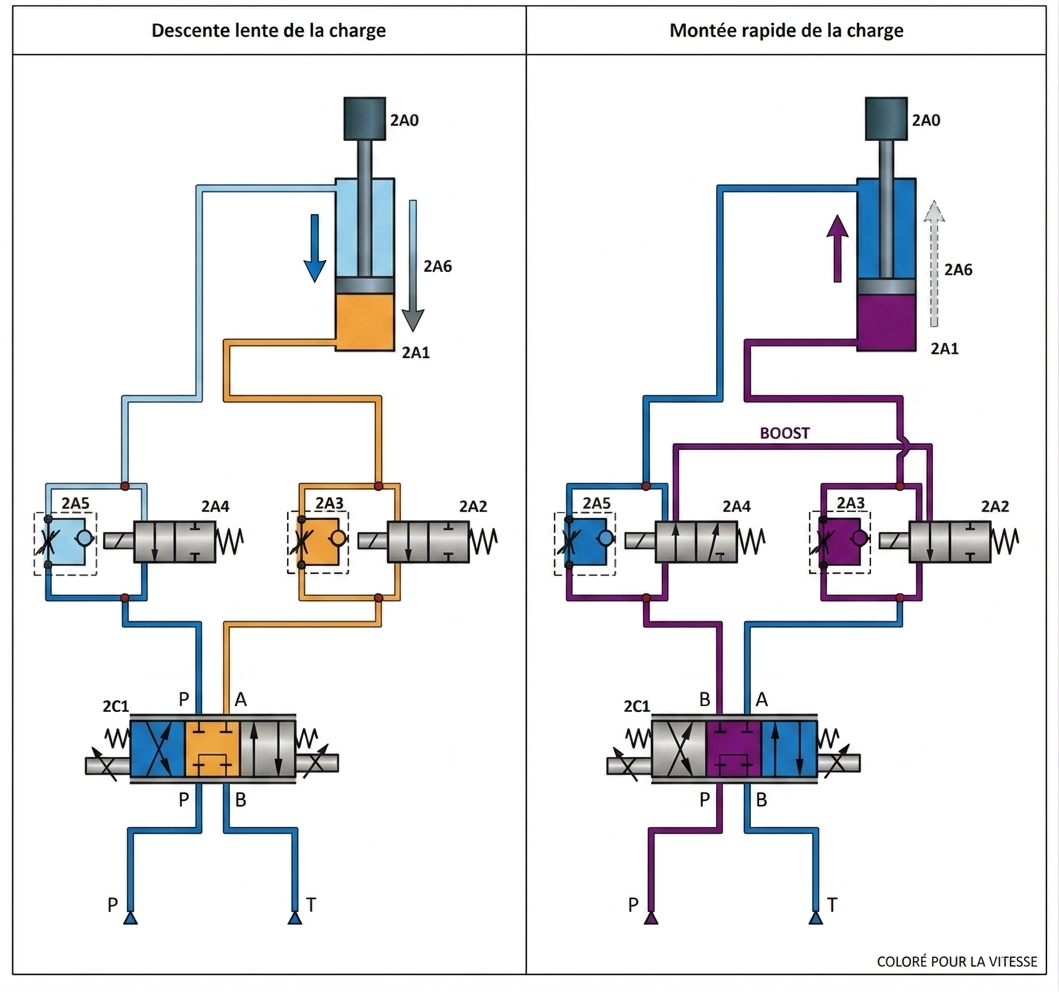
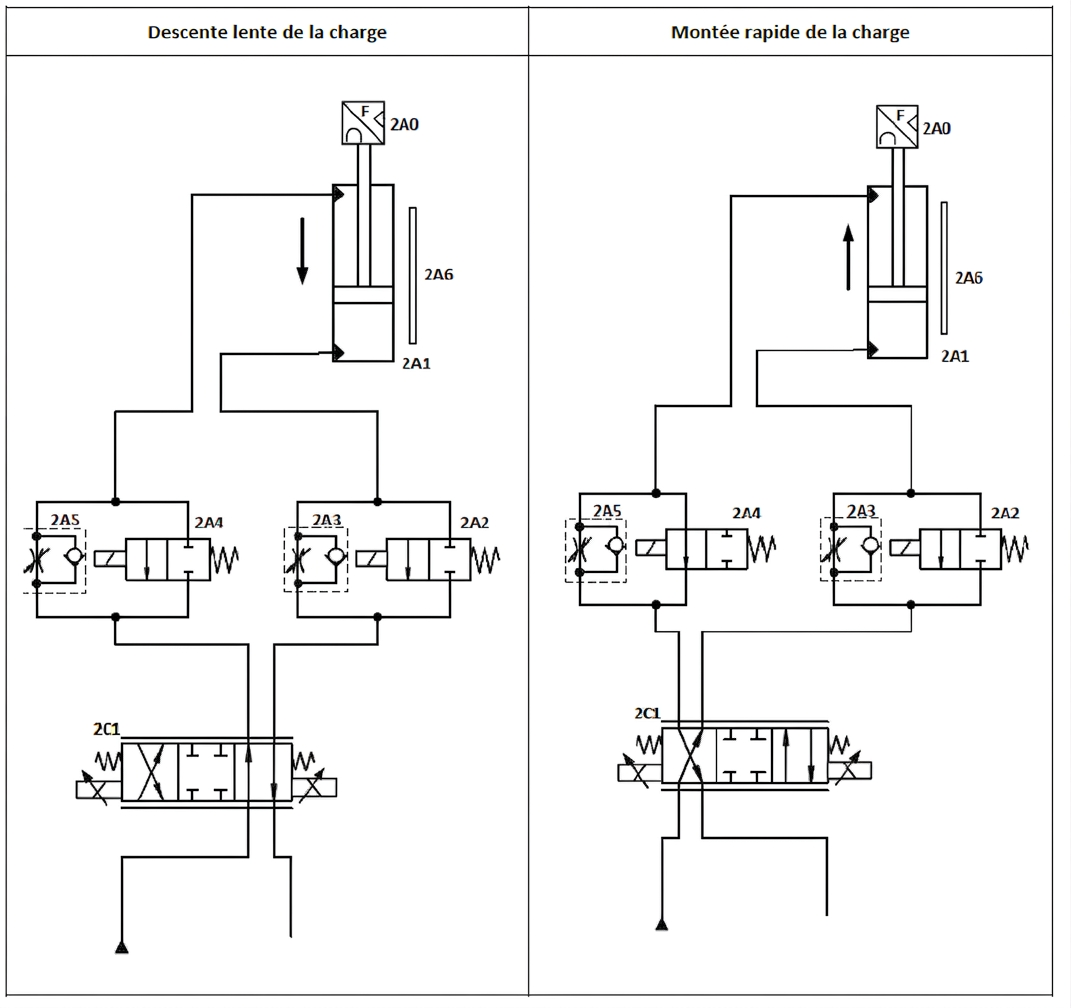
1,00 ptQ.20. Compléter le circuit hydraulique dans les deux phases de montée rapide et de descente lente.
1,00 ptTâche n°2 : Dimensionnement et choix du vérin.
A partir du D.Res 4 et du D.Res 5, sur le D.Rep 6.
Q.21. Calculer la pression maximale pmax (en Pa) que le vérin Vh doit supporter lorsque l'effort de poussée est maximal.
1,00 ptQ.22. Déterminer le diamètre de la tige d (en mm) en se référant à l'abaque.
0,50 ptQ.23. A partir de l'extrait du catalogue constructeur du vérin, choisir le type du vérin adéquat.
0,50 ptTâche n°3 : Analyse de la solution technologique choisie par le concepteur pour réaliser la liaison entre le vérin hydraulique et le module horizontal (MH).
A partir du D.Res 6, sur le D.Rep 6 et le D.Rep 7.
Q.24. Compléter le tableau relatif à la liaison (4)/(7) en indiquant la solution choisie pour la réaliser et en mettant une croix (X) sur la case convenable.
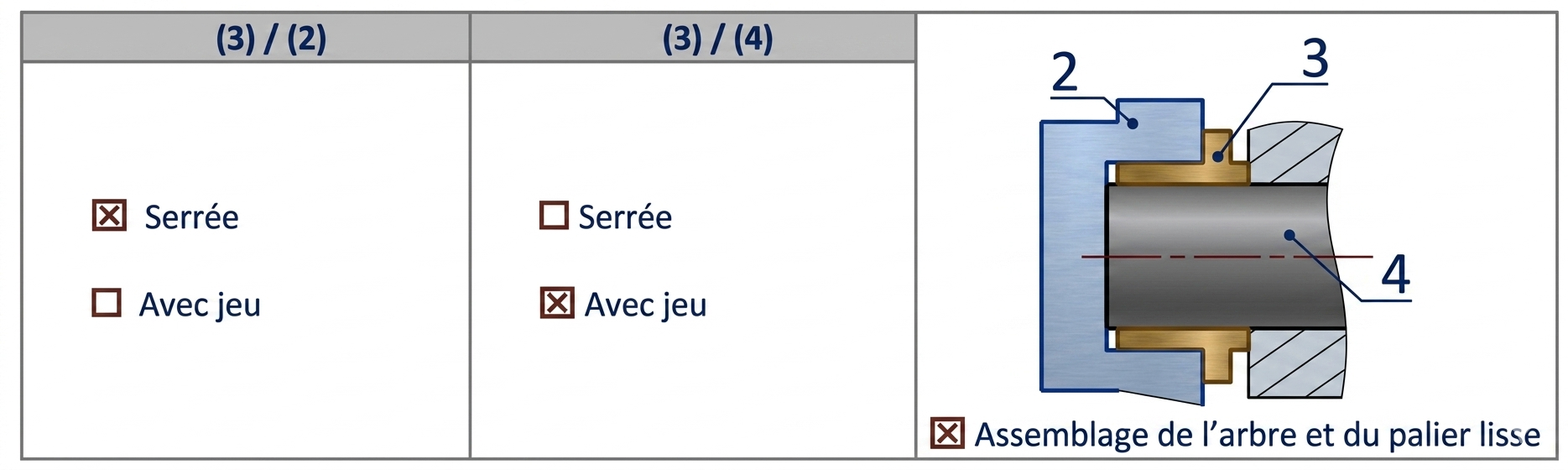
0,50 ptQ.25. Donner le nom et la fonction de la pièce (3).
0,50 ptQ.26. D'après les hachures quel est le matériau de la pièce (3) ?
0,25 ptQ.27. Comment est montée la pièce (3) sur la chape (2) et sur l'axe (4) ? (Cocher la bonne réponse).
0,25 ptQ.28. Compléter le dessin de la chape de fixation (2) en :
- Vue de face coupe A-A.
- Vue de dessus.
Nota : Ne pas représenter les formes cachées.
Tâche n°4 : Etude du capteur de déplacement linéaire (IMS)
A partir du volet 2 et du D.Res 5, sur le D.Rep 7.
Q.29. Donner la nature de l'information d'entrée, de sortie et la plage de mesure du capteur (IMS).
0,50 ptQ.30. Trouver l'équation linéaire y = a.x + b qui caractérise ce capteur.
0,50 ptQ.31. Que représente le paramètre a du capteur ?
0,25 ptQ.32. Pour quelle position h (en mm) a-t-on 17 mA en sortie ?
0,50 ptQ.33. Ce capteur peut-il atteindre ou afficher cette valeur du courant ? justifier.
0,25 pt![<strong>Actigramme A-0</strong><br><em>[Diagramme fonctionnel : Entrées de contrôle, Entrée principale, Fonction Globale, Sorties]</em>](images/scinjrat/q01.png)
![<strong>Actigramme A-0</strong><br><em>[Diagramme fonctionnel : Entrées de contrôle, Entrée principale, Fonction Globale, Sorties]</em>](images/scinjrat/q01rep.png)
![<strong>Diagramme d'interaction (Bête à cornes / Pieuvre)</strong><br><em>[Éléments externes reliés au Dépileur]</em>](images/scinjrat/q02.png)
![<strong>Diagramme d'interaction (Bête à cornes / Pieuvre)</strong><br><em>[Éléments externes reliés au Dépileur]</em>](images/scinjrat/q02rep.png)
![<strong><strong>Schéma Chaîne Fonctionnelle</strong><br><em>[Chaîne d'information & Chaîne d'énergie]</em>](images/scinjrat/q03.png)
![<strong><strong>Schéma Chaîne Fonctionnelle</strong><br><em>[Chaîne d'information & Chaîne d'énergie]</em>](images/scinjrat/q03rep.png)
| Mouvement | Rotation de (P) | Translation de (P) | Rotation de (C) | Translation de (C) | Réversible | Irréversible |
|---|---|---|---|---|---|---|
| Coche (X) | X | X | X |
$\omega_P = \frac{2 \cdot V_{MH}}{m \cdot Z_P} = \frac{2 \times 0,35}{0,006 \times 25} \approx 4,667 \text{ rad/s}$
$N_P = \frac{30 \cdot \omega_P}{\pi} = \frac{30 \times 4,667}{\pi} \approx \mathbf{44,56 \text{ tr/min}}$
$P_m = \frac{P_c}{\eta_g} = \frac{980}{0,931} \approx \mathbf{1052,63 \text{ W}}$
Le modèle adapté est le LS 90 SL ($P_n = 1,1 \text{ kW}$, $N_n = 1410 \text{ tr/min}$ proche de $1425,92 \text{ tr/min}$).
$V_3 = V_1 = \frac{V_2}{m} = \frac{48}{0,218} \approx \mathbf{220,18 \text{ V}}$
$U_{13} = 220,18 \times \sqrt{3} \approx \mathbf{381,36 \text{ V}}$ (proche de 380V réseau industriel).
$p_{max} = \frac{F_{vmax}}{S} = \frac{80\,000}{7,854 \times 10^{-3}} \approx \mathbf{10,18 \times 10^6 \text{ Pa}}$ (soit $\approx 101,8 \text{ bar}$)
Référence catalogue : V601001500SF


• Fonction : Guider en rotation l'axe (4) dans la chape (2), réduire les frottements et limiter l'usure.
• Vue de face coupe A-A : Montage du trou alésé pour le coussinet, perçage pour la goupille/axe, chanfreins, traits de coupe, hachures de la chape.
• Vue de dessus : Contour extérieur, perçages centraux, arêtes visibles, symétrie. (Pas de traits cachés selon l'énoncé).
• Information de sortie : Analogique (Courant 4 – 20 mA)
• Plage de mesure : [50 – 2000 mm]
$$a = \frac{16}{1950} \Rightarrow a = 8,2 \times 10^{-3}$$ et $$4 = 8,2 \times 10^{-3} \times 50 + b \Rightarrow b = 3,59$$
donc : $y = 8,2 \times 10^{-3}.x + 3,59$